修論発表会が行われました!
当研究室からは川筋君と西出君が発表しました.
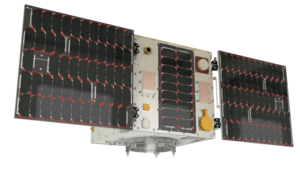
「宇宙機用姿勢センサの機上校正アルゴリズムの研究」川筋直樹
概要:宇宙機は、ミッションや動力上の理由から姿勢制御を必要とする.姿勢制御におけるフィードバック制御のためには、現在の姿勢を知る必要がある。このため、センサ情報に基づいて姿勢を推定する.センサ情報は誤差を含んでおり,これらの誤差は姿勢推定における誤差として現れる.センサの誤差は飛行中に変化するため,飛行中に機上で誤差パラメータを推定する必要がある.姿勢推定には様々な手法が提案されている.本研究の主な課題は,センサ誤差パラメータの推定・校正法を開発し、逐次アルゴリズムを用いた姿勢の同時推定法を開発した.また,数値シミュレーションにより,提案手法の適用性を計算精度,計算速度の観点から評価した.
本研究では姿勢推定の基準ベクトルとして,太陽方向ベクトル,地磁気ベクトル,角速度ベクトルを仮定する.地磁気ベクトル,角速度ベクトルの計測値には,時間依存性のある歪み成分やオフセット成分があると仮定した.推定は磁力計のパラメータを拡張カルマンフィルタ(EKF)を用いて推定し,次に乗法拡張カルマンフィルタ(MEKF)を用いて姿勢とジャイロのパラメータを推定した.EKF による磁力計パラメータの推定,MEKF によるジャイロパラメータと姿勢の推定において,精度よく推定できた.計算時間は与えられたセンサデータの時間ステップよりもはるかに短く,シミュレーション環境と実機環境のCPUの性能差を考慮しても実用的な計算速度であった. 本研究により,磁力計パラメータ推定,ジャイロパラメータ・姿勢推定ともに,実用的な計算精度と計算速度を持つことがわかった。
「成層圏気球ゴンドラの姿勢制御に関する研究」西出太郎
概要:大型のヘリウムガス気球は,世界中で科学観測や工学実験に広く利用されている.このような気球飛翔システムは,気球,サスペンション,ゴンドラの3つで構成される.観測機器を搭載するゴンドラは細長いサスペンションで気球から吊り下げられる.成層圏から天体を望遠鏡で観測するミッションの場合,ゴンドラの姿勢を安定させ,望遠鏡で観測対象を導入・追尾するために,姿勢制御装置がゴンドラに搭載される.CMG(コントロール・モーメント・ジャイロ)は,宇宙機の姿勢制御に用いられるアクチュエータである.CMGは,ジンバル構造上で高速回転するホイールを備えている.ジンバルを用いてホイールの回転軸の向きを変えることで発生するジャイロトルクを姿勢制御トルクとして利用する.しかし,CMGシステムには,ジンバル角度の特殊な組み合わせにより,要求トルクが出力できない状態(特異点)が存在する.CMGシステムを姿勢制御に用いる場合,この特異点の問題を考慮する必要がある.
そこで本研究では,CMGシステムを用いた姿勢安定化において,目標追従のための制御則を含む制御系を開発することを目的とした.また,数値シミュレーションによる評価も行った.制御システムを評価するために,ダイナミクスシミュレーションを開発した.ダイナミクスモデルには5つの剛体と8つの回転関節が含まれている.運動方程式はKainの運動方程式を用いた.これまでの気球ゴンドラにおけるポインティング制御システムの評価では,かなり単純化された運動方程式が用いられてきた.本研究の方法は,振幅が比較的小さい高周波領域での特徴的な振動数として現れるモデルの複雑さを保持することができるが,要求されるポインティング精度が高くなるにつれて問題が大きくなる.本研究では,5パターンのシミュレーションを行った結果,ポインティング制御システムは,気球飛行システムが複雑に振動する状況下でも,目標を適切に追尾できることが示された.また,ポインティングエラーは気球飛行システムの振動振幅に強く影響されることが示唆された.ポインティング誤差は振動の振幅に比例する傾向が得られた.実際のフライトでは,振動の振幅は数時間の時定数で時間と共に減衰することが既に知られている.したがって,このシミュレーションの結果は,ミッションの有効な観測期間の推定につながる.
\ 最新情報をチェック /