成層圏気球とは
成層圏は,高度約 10 ~ 50 kmの層のことをいいます.気圧は地上の1/3(300 hPa,10 km)~ 1/1000 (1 hPa,47km),気温は最も寒いところで-80℃にもなる,極限環境です.空気が薄いため燃料を燃やすことが難しく,飛行機では到達できても高度18 kmがせいぜいです.一方,人工衛星にとっては空気が濃すぎて抵抗が大きく,速度が落ちてしまい軌道を維持することができません.飛行機でも人工衛星でも行くことが困難な領域に,長時間滞空することができるのが成層圏気球です.
成層圏気球はヘリウムガスの浮力で空に浮かびます.小さな物はゴム風船を使い,重さ3 kgまでのペイロード(荷物)を運ぶことができます.世界中で毎日飛ばされている気象用ラジオゾンデも成層圏気球の一種です.大きな物ではペイロード重量が1トンを超えるものも珍しくありません.気球の飛ぶ高度はヘリウムガスの体積と気球とペイロードの総重量のバランスで決まります.1トン以上のペイロードを高度30 kmに運搬する気球は,満膨張時に直径100 mに達することがあります.草野球のグラウンドとほぼ同じくらいの大きさです.

成層圏は非常に空気が薄いため,さらに上空は宇宙のように昼でも暗く見えます.また,雲のはるか上でもあるため,常に快晴です.天体観測に非常に都合が良いため,1960年代から気球で望遠鏡を成層圏に運んで天体観測が行われてきました.気球はガスが失われない限り成層圏にとどまり続けることができるので,長いフライトでは1週間~1ヶ月連続して観測を行うこともできます.また,高度30 km付近の気圧は地上の約 1/100 で火星の地上付近の気圧に近いことから,火星の空を飛ばす飛行機の実験にも用いられています.
科学観測や実験を行うための大型成層圏気球は,各国の宇宙機関が運用しています.日本では宇宙航空研究開発機構(JAXA)宇宙科学研究所,アメリカではNASA,ヨーロッパではCNES,SSC.他にもインドやブラジル,中国などが毎年実験を行っています.成層圏気球は,ロケットと比べて振動や衝撃がきわめて小さく,デリケートな精密観測機器に優しい乗り物です.また,実験や観測が終わったあとは,ペイロードをパラシュートで地上,または海上に降下させ回収します.観測データを無線で地上に送る必要がないため,無線では送るだけで何日もかかるような大量のデータを得ることができ,さらに回収した観測機器に問題がなければ再使用することもできます.
なぜ姿勢運動の研究が必要なのか
成層圏気球は,ヘリウムガスの浮力で空間に浮かんでいます.さらに,観測機器が設置されるペイロード部(ゴンドラ)は気球本体から長く細い吊り紐で吊られています.そのため,1トンを超える重量のゴンドラでさえも小さな力で簡単に向きが変わってしまいます.
例えば,望遠鏡で天体を観測するときに望遠鏡が置かれている床が動いてしまったら,望遠鏡は目標の天体を向かず観測することができません.そのためゴンドラには,ゴンドラの向きを変えようとする力がはたらいたときに,それを打ち消して望遠鏡を目的の方向に向けるための「姿勢制御装置」が備えられます.望遠鏡以外にも,長時間飛翔する気球ゴンドラの電源のため太陽電池を搭載し太陽方向に向け続ける,あるいは機器内部の温度上昇を抑えるために放熱機器を太陽と反対側に向けるなど,ゴンドラの姿勢制御の目的はさまざまです.
ここで問題になるのが,どのような性能の姿勢制御装置を用意したらよいのか,です.ゴンドラに加えられる力の大きさや速さがわかっていれば,それよりも十分強くて速い制御装置をゴンドラに搭載することで,ゴンドラや観測装置を目標方向に向け続けることができます.しかし現状では,ゴンドラにどのような性質の力が働くのか,十分な理解が得られていません.ゴンドラに搭載した制御装置の性能が加えられる力に対して不十分なら,ミッション目的を十分に達成することが困難になります.わからないからと言ってやみくもに大きな姿勢制御装置を搭載すると,ミッションのための機器へ割ける重量,スペース,電力などにしわ寄せがいきます.飛翔中のゴンドラにどのような力が働くのか,事実をもとに検討する必要があります.
気球が水平飛翔する成層圏では,大気が1/100~1/1000まで薄くなります.つまりゴンドラに風が吹きつけたとしても,地上の1/100~1/1000の力でしかありません.さらに気球は周囲の気流に流されるため,気球,あるいはゴンドラが受ける風はほとんど0です.しかし,気球本体は直径数十m~100mにおよびます.周囲の大気が薄くても,受ける面積が大きければその分力は大きくなります.気球の周囲の風向きが変わったとき気球が揺さぶられ回転を始めると,その運動を止めようとする大気の力も弱いため,長時間にわたって揺れや回転が続きます.さらに気球とゴンドラをつなぐ吊紐もねじれます.ねじれると元に戻ろうとする力が発生し,振動となります.
気球の大きさ,吊紐の長さ,ゴンドラの大きさや重さは,フライトごとにさまざまです.そのため過去に飛ばしたゴンドラにかかった力と,将来飛ばそうとしているゴンドラにかかるであろう力は,異なるはずです.将来飛ばそうとしているゴンドラにかかる力をある程度正確に予想するためには,気球が飛んでいる間にゴンドラだけでなく,気球や吊紐がどのように運動したかを調べ,かかった力を推定する必要があります.
姿勢運動を測るために,まず計測器の開発からスタート
飛翔している気球ゴンドラの姿勢運動は過去に何回も計測されてきました.しかし,それらの計測頻度やセンサの性能はばらばらで,直接比較するのは困難です.そして気球本体や吊紐の運動を測定した例はありません.そこで,この研究では飛んでいる気球本体や吊紐の運動を計測する手段から開発を始めました.
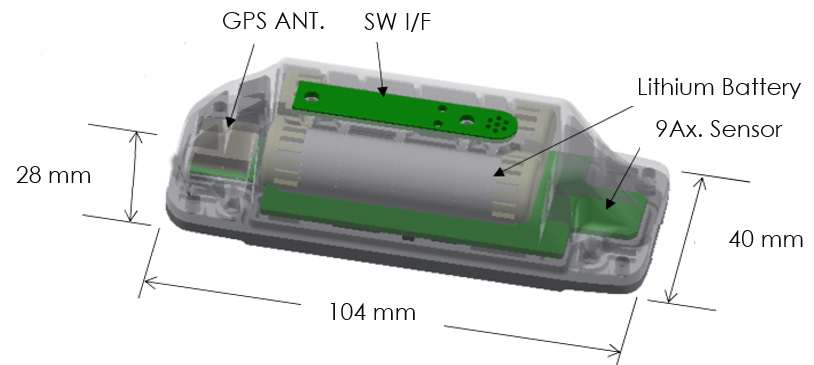
気球や吊紐,ゴンドラの運動を邪魔せずにそれぞれの運動を計測,保存でき,気球に取り付けられていても気球を傷つけることがなく,気球が飛ぶ極限環境でも確実に動作し,海に着水しても海水に耐えてデータを失わず,繰り返し使用できる.そんな都合のよい装置は世の中にありません.そこで電子回路基板,ケースからソフトウェアに至るまで,すべて自分で作りました.
開発した計測器(GPS姿勢ロガー)は2017年にJAXAの気球実験で初フライトを行いました.気球頭部,気球尾部,パラシュート頭部,パラシュートー吊紐結合部,吊紐ーゴンドラ結合部,ゴンドラの計6か所に取り付けられた姿勢ロガーは計画通りにデータを取得し,海上に着水した気球,ゴンドラから回収されました.データは大学に戻ってから解析され,各ロガーの姿勢運動だけでなく,姿勢ロガーが取り付けられた箇所の間の変形もとらえることができました.


このように開発されたGPS姿勢ロガーは,その後毎年のJAXA気球実験でデータの収集を行っています.最近は,さらに高頻度の計測を行うため,第2世代のGPS姿勢ロガーを開発中です.