宇宙機がミッションを遂行するために,宇宙機を目的の方向に向ける制御が必要になることがあります.この操作を「姿勢制御」といいます.宇宙機の目的が天体を観測することなら,観測装置を目標天体に向けなければなりません.宇宙機の限られた面にのみ太陽電池パネルがあるなら,太陽電池パネルを太陽に向けないといずれバッテリ残量が0になります.より高度なミッション,より高い性能を宇宙機に持たせるためには,姿勢制御の技術が必須です.
宇宙機の姿勢制御の役割
軌道上の人工衛星は無重力空間に浮いています.このとき衛星は重心を中心とした回転運動をします.地上にいる私たちは立っていても座っていても,床に体の一部が接して支えられているため,床との摩擦が体と床の接触面に働いて,どんな方向にも勝手に回転することはありません.しかし,衛星を外から空間に固定する足場はありません.そのため,地上にいる我々には想像もできないほど小さな力,例えば太陽の光が当たっただけで,あるいは磁石が取り付けられているだけで,自動車のような大きさのものがゆっくりと回転を始め,止まることはありません.
地上にいる私たちは床面の摩擦力があるため,腕を振り回しても体をねじっても,元の姿勢に戻ることができます.しかし,衛星は重心以外に空間に固定されていないため,太陽電池パドルのような可動部が回転すると,その反力で衛星の本体も逆方向に回転します.
軌道上の人工衛星は重力の制約を受けないため,あらゆる方向に衛星本体の向きを変えることができます.そのため,ミッションのために観測器を目標の天体に向ける際は,衛星ごと観測器を目標方向に向けます.衛星が与えられたミッションを遂行するためには,衛星の姿勢を乱すような力を受けても負けずに目標の方向に衛星を向けるための,制御が必要です.
同様のことは成層圏気球の観測器搭載部(ゴンドラ)でも言えます.人工衛星と異なり1Gの重力環境にいるため,鉄棒をするような水平方向を軸とする回転はしません.しかし気球はヘリウムガスの浮力で空中に浮いており,浮力中心の1点で支えられています.それ以外に支えがないのは,人工衛星と同様です.これによって,鉛直方向を軸とする回転を止める力が発生せず,ひとたび回転が始まると長時間続きます.また吊紐がねじれると振動が始まります.さらに浮力中心を支点とした振り子としてふるまうため,一度小さな揺れが長時間続きます.人工衛星とは性質が違いますが小さな力で大きな運動が長時間続く点,そしてミッション遂行のため機体を特定の方向に向けなければいけない点は,人工衛星と同様です.
姿勢制御の方法
宇宙機には,地上に立つ人間や自動車と違い,足場がありません.宇宙機本体を回転させるため,リアクションホイールやコントロールモーメントジャイロ,磁気トルカやガスジェットスラスタなどが用いられます.
高校の物理で「運動量保存則」を習ったことを覚えているでしょうか?ニュートンの「慣性の法則」を拡張したものです.物体(質点)の質量Mと速度VをかけたMVを運動量とよび運動の変化のしにくさを表します.複数の物体からなる系(システム)では,すべての物体の運動量の総和は,物体同士が衝突したり分離しても,外部から力が作用しない限り一定であるという法則です.運動量保存則は物体の並進運動についての法則で,回転運動については「角運動量保存則」があります.角運動量は物体の回転運動の変化のしにくさを表す量で,複数の物体の角運動量の総和は外部から力が働かない限り保存されます.
リアクションホイールは角運動量保存則を用いた宇宙機の姿勢制御器です.宇宙機本体に回転する円盤(ホイール)を搭載します.宇宙機もホイールも静止している状態では角運動量は0です.この状態からホイールが回転を始めるとホイールが角運動量を持ちます.宇宙機本体とホイールの総角運動量が0であり続けようとして,本体にホイールの持つ角運動量を打ち消すような角運動量が発生します.つまり,宇宙機本体が回転を始めます.そしてホイールが回転をやめると,宇宙機本体も回転を止めます.宇宙機は3次元空間に浮いているので,回転する軸も3つあります.そのためリアクションホイールも通常3台以上宇宙機に搭載されます.リアクションホイールは宇宙機本体と角運動量を交換しているとも見ることができます.そのため「角運動量交換型アクチュエータ」と呼ばれることもあります.コントロールモーメントジャイロも同じ種類です.
一方,磁気トルカは一言でいうと「電磁石」です.小学校の理科で鉄の芯の周りに電線を巻き付けて電池をつなぎ,クリップや砂鉄をひきつけたことがある人も多いでしょう.地球も北極と南極をS極とN極とする巨大な磁石であり,糸でつるした磁石のN極が勝手に北極の方向を向くのは皆さんご存じのとおりです.宇宙機に電磁石を搭載し電流を流すと,N極が北極方向を向くように回転を始めます.その力は決して大きくありません.しかし摩擦の働かない,またはごく弱い環境ではそれでも十分なのです.
磁気トルカは宇宙機の周囲の磁場から力を得ているので,角運動量保存則にとらわれません.そのため,太陽光圧や薄い大気から受けた力によって意図せず得てしまった宇宙機の角運動量を減らす作用を持ちます.ガスジェットスラスタも同様です.
私たちの取り組み
FUJIN2の姿勢制御・望遠鏡指向制御手法の研究開発
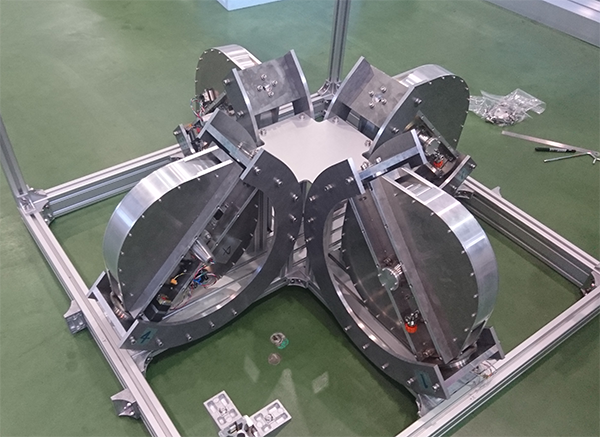
気球望遠鏡FUJIN2では,望遠鏡を設置するゴンドラの指向制御にコントロールモーメントジャイロ(CMG)を用います.CMGは大きな回転力(トルク)を素早く取り出すことができる制御器で,人工衛星でも特に大型のもの(たとえば国際宇宙ステーション)などに使用されています.
FUJIN2には,1秒間に100回転(6000rpm)する直径30cmのステンレス製ホイールを内蔵するCMGを4台搭載し,重量1.6トンのゴンドラを0.1度の精度で制御します.ただし人工衛星とは異なり,空中に浮く巨大な気球と長い吊紐を介してつながっているため,吊紐のねじれによる振動の影響が強く出ます.そのため,ゴンドラと吊紐の接続点をモータで回転制御し,吊紐がねじれないようにCMGと同時に制御します.
4台のCMGを気球ゴンドラに搭載するのは世界初の試みで,高精度な制御を達成するための方法を研究しています.
超小型衛星の姿勢制御システムの開発

リアクションホイールユニット
人工衛星の姿勢制御では,リアクションホイール(RW)が一般的に用いられています.しかしそれは今のところ,比較的大きな衛星に限った話で,数kg~数十kg程度の超小型衛星では,成功事例が多くありません.超小型衛星の分野では,RWを用いた姿勢制御技術はまだまだ発展途上です.
私たちは3Uキューブサット(10x10x30cm,4kg)の超小型人工衛星BEAKに搭載できる超小型RWユニットと基板型磁気トルカを開発しました.限られた計算能力のもの必要十分な姿勢制御のための手法も研究を進めています.
また,将来の金沢大学衛星のための姿勢制御装置の開発の検討も進めます.
新しい姿勢制御手法の研究
宇宙機のミッションやシステムはさまざまです.姿勢制御手法ひとつとっても,何が最適かはミッションやシステムによって異なります.宇宙機を用いたミッションやビジネスが爆発的に広がりつつある現代において,これまで優秀な性能を示した姿勢制御手法やシステムがこれからもそうであるとはかぎりません.
私たちはリアクションホイールやコントロールモーメントジャイロ,磁気トルカなどの姿勢制御機器の使い方を,キューブサットなどの超小型人工衛星に具体的に搭載して使用することを想定し,従来の手法の限界を探り,新たな手法を研究しています.
研究は数値シミュレーションと実験を併用して進めます.実験では,無重力空間に浮かぶ宇宙機の回転運動を再現するため,空気で宇宙機を浮かせ摩擦を極力減らした実験装置を用います.